Un modelo para robots submarinos autónomos podría ayudarles a navegar por aguas inexploradas.
El océano alberga extensiones aparentemente interminables de territorio inexplorado, y cartografiar estas aguas globalmente inexploradas es una tarea difícil. Las flotas de robots submarinos autónomos pueden ser una herramienta cartográfica inestimable, pero deben ser capaces de navegar por zonas abarrotadas y, al mismo tiempo, ser eficientes y precisos.
En un estudio publicado el 24 de junio en el IEEE Journal of Oceanic Engineering, un equipo de investigadores ha desarrollado un nuevo sistema que permite a los robots submarinos autónomos cartografiar zonas concurridas con gran eficacia y bajo índice de error.
Uno de los principales problemas a la hora de cartografiar el mundo submarino es la incertidumbre de la posición del robot.

«Como el GPS no está disponible bajo el agua, la mayoría de los robots submarinos no tienen una posición de referencia absoluta, y la precisión de sus decisiones de navegación fluctúa», explica Brendan Englott, profesor asociado de ingeniería mecánica del Instituto Tecnológico Stevens de Hoboken (Nueva Jersey), que participó en el estudio. «Predecir cómo cambiará a medida que el robot explore un terreno desconocido permitirá al vehículo submarino autónomo elaborar un mapa lo más preciso posible en estas difíciles condiciones».
El modelo creado por el equipo de Englot utiliza un mapa virtual que abstrae el entorno que el robot aún no ha visto.
Han desarrollado un algoritmo que planifica la ruta a través de este mapa virtual de forma que tenga en cuenta la incertidumbre de la posición del robot y sus percepciones.
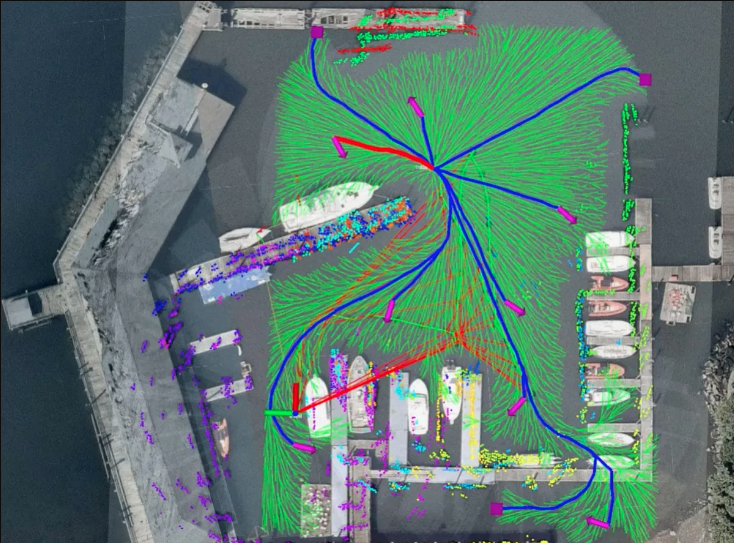
El mapeo perceptivo se realiza mediante imágenes de sonar que ayudan a detectar objetos en el entorno frente al robot en un radio de 30 metros y un campo de visión de 120 grados. «Procesamos las imágenes para extraer una nube de puntos de cada imagen de sonar. Estas nubes de puntos muestran dónde están las estructuras submarinas en relación con el robot», explica Englot.
A continuación, el equipo de investigación puso a prueba su método con el robot submarino BlueROV2 en el puerto de Kings Point, en el estado de Nueva York, una zona lo suficientemente grande como para acumular importantes errores de navegación, pero lo suficientemente pequeña como para realizar una serie de pruebas experimentales sin mucha dificultad, dijo Englott. El equipo comparó su modelo con varios existentes y probó cada uno de ellos en al menos tres ensayos de 30 minutos en los que el robot se desplazó por el puerto.
Los diferentes modelos también se evaluaron mediante simulaciones.
«Los resultados mostraron que cada uno de los modelos competidores tenía sus propias ventajas, pero nuestro modelo ofrecía un equilibrio muy atractivo entre la exploración rápida de un entorno desconocido y la producción de mapas precisos de ese entorno», afirma Englo.
Señala que su equipo ha presentado una solicitud de patente para utilizar su modelo con fines de exploración submarina de petróleo y gas. Prevén que el modelo también será útil para una gama más amplia de aplicaciones, como la exploración de turbinas eólicas en alta mar, la acuicultura en alta mar (incluidas las piscifactorías) y las infraestructuras civiles, como muelles y puentes.
«También nos gustaría ampliar esta técnica a escenarios de mapeo en 3D, así como a situaciones en las que ya existe un mapa parcial y queremos que el robot utilice este mapa de forma eficiente en lugar de volver a escanear completamente el entorno», dice Englo. «Si podemos ampliar nuestro sistema para que funcione en escenarios de cartografía 3D, podremos utilizarlo para explorar redes de cuevas submarinas o pecios».
No se pierda las próximas noticias relacionadas con el mundo de la robotica.
Índice de contenidos